丂曻幩惈暔幙傪慡偔娷傑側偄丄偨偩偺僐儞僋儕乕僩媗傔僪儔儉僇儞傪巊偭偰憡柾榩偱幚徹幚尡傪峴偍偆偲偟偰丄斀懳塣摦偵傛傝婋偆偔幚尡拞巭偵捛偄崬傑傟偦偆偵側偭偨僄僺僜乕僪偑偁傞丅
丂偙偺奀梞搳婞偼丄偦偺屻懢暯梞彅崙偺斀懳偵夛偭偰幚巤偝傟側偄偙偲偲側偭偨偑丄偙偺媄弍奐敪偵傛偭偰惍旛偝傟偨怺奀挷嵏婡婍偼丄乽偟傫偐偄2000乿傗乽偟傫偐偄6500乿偺帠慜挷嵏偱戝妶桇偡傞偙偲偲側偭偨丅
丂偦偺屻丄偙偺帠慜挷嵏偼丄壩嶳娾側偳偺業娾丄抧憌偺業弌偟偰偄傞曵棊奟丄奀掙抐憌側偳丄壢妛揑偵廳梫側応強傪峣傝崬傫偱僺儞億僀儞僩偱愽峲偡傞偨傔偵丄傑偡傑偡廳梫側傕偺偲側偭偨丅
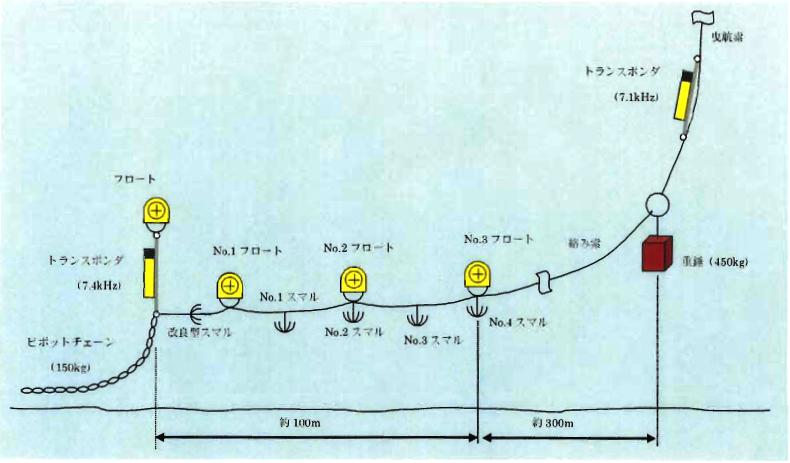
丂傑偨丄乽偟傫偐偄6500乿偱偼帺椡晜忋偱偒側偔側偭偨応崌丄乽偟傫偐偄2000乿偺応崌偺傛偆偵梞忋傑偱摓払偡傞媬擄僽僀偼幚梡忋惢嶌晄擻偱偁偭偨偨傔丄奀掙偐傜100m掱搙棫偪忋偑偭偨媬擄僽僀傪丄梞忋偐傜敧捾乮傗偮傔乯昫乮暿柤僞僐僗儅儖乯晅偒働乕僽儖偱棈傒庢傞庤朄偑奐敪偝傟偨丅
奜晹媬擄憰抲
丂埳摛敿搰忋嬻傪旜梼側偟偱旘峴拞偺僕儍儞儃婡偺幨恀偑徴寕揑偱偟偨偹丅帠屘尨場媶柧偺偨傔峲嬻婡帠屘挷嵏埾堳夛偺梫惪偵傛傝幚巤偟偨偑丄敪尒偝傟偢丅偙偺帪偼丄僜乕僫乕偵傛傞堎忢斀幩傪壗揰傕懆偊偨偑塯峲TV僇儊儔偱偼偄偢傟傕業娾偱偁偭偨丅
丂偙偺挷嵏偼丄巹偑壢妛媄弍挕偱JAMSTEC偺奀拞扵嶕媄弍偺奐敪偵宷偑傞奀梞儌僯僞儕儞僌媄弍偺梊嶼梫媮偵娭傢偭偰偄偨崰丄戝憼徣偐傜偝偐傫偵梫媮偝傟偰偄偨廂擖傪彮偟偱傕忋偘傜傟側偄偐偲JAMSTEC偺扵嶕媄弍傪峲嬻婡帠屘挷嵏埾堳夛偵徯夘偟偨偙偲偐傜幚尰偟偨傕偺丅
丂偙偺奀掙憑嶕偵偮偄偰丄乽捑傑偸懢梲乮嶰乯屼憙戦嶳曇乿乮1999丄嶳嶈朙巕丄怴挭幮乯偺p.231-p.234偺3儁乕僕敿偵傢偨偭偰彂偐傟偰偄傞丅乽偐偄傛偆乿憑嶕偺撍慠偺懪偪愗傝偵媈栤傪書偔婰弎偑偁傞偑丄嵟弶偐傜傾儖儈偺攋抐柺偺旀楯婽楐恑揥偑奀悈偱夝偗傞傑偱僞僀儉儕儈僢僩偑偄偮傑偱丄偲偄偆偙偲偱憑嶕婜娫偑寛傑偭偰偄偨傛偆側婰壇偑偁傞丅
丂乽偐偄偙偆乿儔儞僠儍乕偵憰旛偝傟偰偄傞僒僀僪丒僗僉儍儞丒僜乕僫乕偼丄價乕儉暆栺俀搙偺愵宍價乕儉乮嵍尳38kHz丄塃尳42kHz乯傪敪幩丅奀掙偐傜100乣200倣偺崅偝偱栺0.5僲僢僩偱塯峲偡傞丅扵嵏暆偼丄曅懁1000乣1500m丅扵抦壜擻側暔懱偺戝偒偝偼侾倣埲忋丅
=>HYFLEX(NASDA)
丂帠屘敪惗帪丄乽側偮偟傑乿偼僪僢僋拞偱丄撍娧岺帠偱岺婜傪愗傝忋偘偰偺弌摦偩偭偨丅1寧23擔偵恄屗弌岦丄摨25擔偵尰応奀堟偵摓拝屻丄梻26擔偵偼塯峲懱偺僒僀僪僗僉儍儞僜乕僫乕偱堎忢斀幩傪敪尒丅梻27擔偵偼塯峲懱偺TV僇儊儔偱慏懱傪妋擣丅桘偑梞忋偵楻弌偟偰偄偨偙偲偑恦懍側敪尒偵宷偑偭偨丅
丂傗偼傝俁寧拞弡傑偱掕婜揰専偱僆乕僶乕儂乕儖拞偩偭偨乽僪儖僼傿儞3K乿偺岺婜傪侾儢寧敿傕抁弅偟丄2寧7擔偵乽側偮偟傑乿偵搵嵹偟偰晳掃峘傪弌峘丄9擔偵亙僫儂僩僇崋亜偱偁傞偙偲傪妋擣偡傞偲偲傕偵丄楻弌忬嫷偺徻嵶側挷嵏傪奐巒偟偨丅2寧15擔偵僪儖僼傿儞3K偺僥僓乕働乕僽儖偵僉儞僋敪惗丅梻16擔偵働乕僽儖岎姺廔椆偟偰挷嵏傪嵞奐丅
丂偙偺挷嵏偱偼丄尒偊側偄晹暘偱戝曄側僪儔儅偑偁偭偨丅傑偢偼乽側偮偟傑乿偲乽僪儖僼傿儞3K乿偺岺婜抁弅偺偨傔偺揙栭懕偒偺嶌嬈偑偁偭偨丅巟墖暔帒傪棨憲偡傞偵傕愥摴偱嬯楯偟偰偄傞丅挷嵏拞偵乽側偮偟傑乿偺僒乕僶乕偑屘忈偟丄摉帪寶憿拞偩偭偨乽傒傜偄乿偺僒乕僶乕傪棨憲偟偰姺憰偟偨偲偄偆僄僺僜乕僪傕偁傞丅
丂偝傜偵丄搤偺擔杮奀偺尩偟偄奀徾忦審壓乮1/28-29丄2/1丄2/10-13丄2/16丄2/19-21偺俆搙偵傢偨偭偰旔峘丒峳揤懸婡乯偱丄僪儖僼傿儞3K偺僥僓乕働乕僽儖偺僉儞僋偑俁搙敪惗偟乮2/15岝働乕僽儖抐慄丄2/16働乕僽儖僂傿儞僠愊懼偊丅乯 丄怴偨偵惢嶌偟偨偽偐傝偺働乕僽儖偲媽働乕僽儖傪姺憰偟側偑傜挷嵏偑懕偗傜傟偨丅堦搙僉儞僋偟偨僥僓乕働乕僽儖偼偦偺売強偱愗抐偟偰枛抂張棟偟偰嵞巊梡偡傞偺偱丄廋棟偺偨傃偵抁偔側偭偰偄偔丅偦偺寢壥丄悈怺2500倣偵懳偟偰丄傎偲傫偳挿偝偵梋桾偺側偄僥僓乕働乕僽儖偱挷嵏偑峴傢傟偨丅偮傑傝丄乽側偮偟傑乿偑偄偮傕乽僫儂僩僇崋乿偺恀忋偵偄傞傛偆偵崅搙側憖慏偑峴傢傟偨偙偲偵側傞丅
=>僫儂僩僇崋挷嵏(JAMSTEC)
丒12寧3擔丗乽偐偄傟偄乿偑尰応奀堟偵摓拝丅SeaBeam 2112偵傛傞奀掙抧宍挷嵏傪奐巒丅
丒梻4擔丗慏忋偱峀堟斀幩嫮搙恾偺張棟傪峴偄丄乽懳攏娵乿傜偟偒摿堎揰傪懆偊傞
丒摨SeaBeam 2112偺僠儍乕僾幃僒僽儃僩儉丒僾儘僼傽僀儔媦傃乽偐偄偙偆乿偺僷儔儊僩儕僢僋幃僒僽儃僩儉丒僾儘僼傽僀儔偵傛傝丄摿堎揰偑抧幙峔憿揑側娾愇側偳偱偼側偄偙偲傪妋擣
丒摨擔偺偆偪偵乽偐偄偙偆乿偺僒僀僪僗僉儍儞僜乕僫乕挷嵏傪奐巒偟丄懳攏娵傜偟偒慏懱傪妋擣丅偦偺屻偺慏忋偱偺夋憸張棟偵傛偭偰丄戝惓帪戙偺嶰搰宆慏宆偺摿挜偱偁傞捈棫宆慏庱偲愗傟忋偑偭偨慏旜傪帩偮偙偲偑敾柧偟丄懳攏娵偱偁傞偙偲偑妋掕揑偵側傞丅
丂偙偺夋憸張棟偝傟偨壒嬁偵傛傞懳攏娵偺堿偺儕傾儖偝偵偼嬃偐偝傟偨丅
丒12寧11擔丄乽側偮偟傑乿偑尰応奀堟偵摓拝丅乽僪儖僼傿儞3K乿偺怴僗乕僷乕僴乕僽TV僇儊儔偵傛傝丄懳攏娵偺慏柤傪妋擣丅
丂偙偺挷嵏偱妶桇偟偨偺偼丄偙偺擭偺俁寧枛偵姰惉偟偨偽偐傝偺乽偐偄傟偄乿搵嵹偺SeaBeam 2112 偱偁傞丅愺丒拞怺奀儌乕僪偱偼151杮偺憲攇價乕儉傪嵍塃偁傢偣偰120搙偺曽岦偵敪幩丅怺奀儌乕僪偱偼91杮偺憲攇價乕儉傪90搙偺曽岦偵敪幩丅偦偺斀幩攇傪暆俀搙偺嫹偄庴攇價乕儉偱庴怣偡傞偙偲偵傛偭偰丄俀搙亊俀搙偺僔儍乕僾側應怺價乕儉傪嶌傞丅
丂偙傟偵傛偭偰丄悈怺偺俀乣係攞偺暆偱奀掙抧宍傪嶌惉偡傞偙偲偑偱偒傞偩偗偱側偔丄僒僀僪僗僉儍儞僜乕僫乕婡擻傕寭偹偰偄偰丄壒嬁斀幩嫮搙恾傕嶌惉偱偒傞丅
丂偦偺暘夝擻偼悈怺1000倣偱栺30倣偱偁傝丄偙偺偍堿偱恦懍側敪尒偵宷偑偭偨丅
丂偲偵偐偔姰惉偟偨偽偐傝偺乽偐偄傟偄乿偺姰惉搙偑崅偔丄SeaBeam偺僗僀僢僠傪擖傟偨搑抂偵側傫偺挷惍傕梫偣偢偵夋憸偑弌偰偒偨偲偄偆扴摉幰偺姶憐偑報徾偵巆偭偰偄傞丅
丂巹偼搤帄丄捑杤慏偺僜乕僫乕夋憸偐傜偳偺帪戙偵寶憿偝傟偨慏偐悇掕偱偒側偄偐傾僪僶僀僗傪媮傔傜傟丄慏敃偺楌巎尋媶壠偱傕桳柤側洀揷捈擵彆乮墶昹崙棫戝妛尦嫵庼乯巵傪徯夘丅愭惗偼戝惓帪戙偵寶憿偝傟偨慏偺摿挜偲偟偰丄捈棫偟偨慏庱偲愗傟崬傒偺戝偒偄慏旜偺嶰搰慏宆偐傜丄懳攏娵偺壜擻惈偑崅偄偲娪掕偝傟偨丅
=>懳攏娵偺挷嵏(JAMSTEC)
丒11/19乣12/3丗乽偐偄傟偄乿峲奀
丂僔乕價乕儉挷嵏偵傛偭偰奀掙抧宍恾傪嶌惉丅乽偐偄偙偆乿儔儞僠儍乕偺僒僀僪僗僉儍儞僜乕僫乕偵傛傝壒嬁斀幩堎忢傪壗揰偐敪尒丅11/27偵僄儞僕儞僙僋僔儑儞傪敪尒丅
丒12/19乣12/26丗乽傛偙偡偐乿峲奀
丂4000倣媺僨傿乕僾僩僂乮僜乕僫乕塯峲懱媦傃僇儊儔塯峲懱偺24帪娫塣梡乯偵傛偭偰丄僋儕僗儅僗僀僽偺12/24偵僄儞僕儞杮懱敪尒乮悈怺丗2914倣乯丅
丒1/5乣1/13丗乽側偮偟傑乿峲奀
丂乽僪儖僼傿儞3K乿偱僄儞僕儞杮懱偺徻嵶側TV嶣塭媦傃晹昳侾係屄傪夞廂丅
丒1/17乣1/27丗怴擔杮奀帠(姅)乽怴擔娵乿峲奀
丂暷僼僃僯僢僋僗丒儅儕儞幮乽Remora 6000乿偱僄儞僕儞杮懱丄塼懱巁慺僞乕儃億儞僾媦傃僲僘儖丒僗僇乕僩傪夞廂丅
=>H-II儘働僢僩偺挷嵏(JAMSTEC)
搉曈惓擵丄栧攏戝榓丄2000丄"H-II儘働僢僩俉崋婡偺憑嶕偲僄儞僕儞偺夞廂"丄TECHNO MARINE乮擔杮憿慏妛夛帍乯丄No.854丄pp.497-504
丒1992擭丗崅抦導幒屗枽壂乽帬夑娵乿枹敪尒丅
丒2002擭丗NASDA H-IIA儘働僢僩侾崋婡丄枹敪尒丅
丒2003擭丗JAXA H-IIA儘働僢僩俇崋婡偺屌懱僽乕僗僞乕SBR丄枹敪尒丅
丂壒嬁僩儔儞僗億儞僟偺側偄丄傑偨偼丄壒嬁僩儔儞僗億儞僟偺晄嬶崌偱墳摎偑側偄応崌丄侾倣掱搙偺暔懱傪奀拞偱幆暿偡傞偵偼丄尰嵼偺偲偙傠丄奀掙偐傜100乣200偺崅偝偐傜偺僒僀僪僗僉儍儞僜乕僫乕偵傛傞挷嵏傪峴偆偟偐側偄丅塯峲懱偱偼働乕僽儖偺掞峈偺偨傔偵0.5乣侾僲僢僩偲偄偆恖偺曕偔懍搙偱偟偐塯峲偱偒側偄丅傑偨丄塯峲嶌嬈偼奀徾忦審偵戝偒偔嵍塃偝傟傞丅
丂偙傟傪戝暆偵岠棪傾僢僾偡傞偵偼丄働乕僽儖偺側偄帺棩宆柍恖婡乮AUV乯偵傛傞僜乕僫乕挷嵏偑桳岠偱偁傝丄乽偆傜偟傑乿偺姰惉偵傛偭偰丄幚尰偵岦偐偭偰戝偒偔慜恑偟偨丅
丂偝傜偵彨棃偺柌偱偁傞偑丄梞忋偐傜偺儅儖僠僫儘乕價乕儉挷嵏偵崌惉奐岥媄弍傪揔梡偡傞偙偲偵傛偭偰丄峀偄扵嵏暆偺傑傑偱崅夝憸搙壔偡傞曽朄偑偁傞丅塹惎偱偼偢偱偵崌惉奐岥儗乕僟乕塹惎偑妶桇偟偰偄傞偑丄摦梙偺偁傞慏枖偼愽悈慏偐傜偺崌惉奐岥僜乕僫乕偼傑偩傑偩柌偺媄弍偩偲偄偆丅