孨傕嶌傠偆丄奀拞娤應僌儔僀僟乕
仭奀拞娤應僌儔僀僟乕偲偼丠
丂奀梞娤應傪慡抧媴揑偵儕傾儖僞僀儉偱峴偆偵偼丄娤應慏傗僽僀傛傝傕奐敪旓丒塣梡旓偺埨偄柍恖娤應儘儃僢僩傪偨偔偝傫搳擖偟側偄偲悽奅偺奀傪僇僶乕偱偒傑偣傫丅乽奀拞僌儔僀僟乕乿偼偦傫側敪憐偐傜悽奅偺庡側尋媶強偱奐敪偝傟偰偄傞偲偙傠偱偡丅
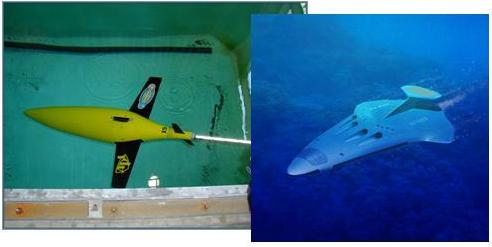
暷儚僔儞僩儞戝妛偺Seaglider乮嵍乯丄NASA偺栘惎偺塹惎僄僂儘僷偺奀傪扵嵏偡傞奀拞僌儔僀僟乕乮塃乯

Webb幮偺SLOCUM
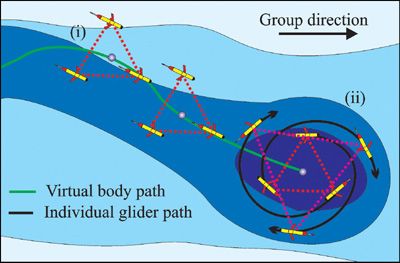
儌儞僩儗僀榩悈懓娰尋媶強偺奀拞僌儔僀僟乕偵傛傞娤應僱僢僩儚乕僋寁夋乮AOSN乯
仠奀拞僌儔僀僟乕
=>SPRAY乮僗僋儕僾僗奀梞尋媶強乯
=>Sea Gliders Show Underwater and Off-World Potential乮NASA乯
=>Underwater Gliders for Ocean Research乮pdf乯
=>SEAGLIDER乮儚僔儞僩儞戝乯
=>Autonomous Underwater Gliders乮pdf乯
=>Slocum Glider乛Discus Glider乮Webb Research幮乯
=>峲峴宆柍嶕柍恖愽悈掵乽俹俿俤俼俷俙侾俆侽乿乛帺暘偱塲偓傪曌嫮偡傞奀拞儘儃僢僩
=>僶乕僠儍儖儌傾儕儞僌梡墌斦宆悈拞僌儔僀僟乕(BOOMERANG乯乛pdf
=>庡梼撈棫惂屼宆悈拞僌儔僀僟乕
仠帺棩宆斂憱儘儃僢僩
=>Autonomous Robot for Oceanic Observation (AROO)
=>A hardware proof of concept of a sailing robot for
ocean observation(pdf)
=>AI on the Ocean: the RoboSail Project(pdf)
=>Autonomous Sailboat
=>SailBot乛SailBot: Autonomous Sailboat Competition(pdf)
栚師乛師儁乕僕